|
Takeaway points
|
Formulas for Herzian Contact
 In order to achieve independence from small geometrical imperfections in their mating elements, kinematic mounts use Herzian contact geometries, where the contact area between the mating elements starts out as zero (point or line contact) and grows as a function of the applied force due to the elastic propeties of the material. This contact area growth process has the advantage that it geometriaclly averages small imperfections, thereby reducing the mount's sensitivty to them. The equations used below are quoted from Roark's Formulas for Stress and Strain, Warren C. Young and Richard Budynas, sixth edition (1989), and rearanged slightly. (Chapter 13, Table 33, page 650) These equation are empirical, but largely agree with results optained from FEA studies we performed, and with measured deformations. The basic equations for elastic point and line contact stresses are listed below. (Numberic subscripts apply when the two contacting materials are not the same)
When calculating kinematic mount elements, a few straight forward adaptations are necessary: 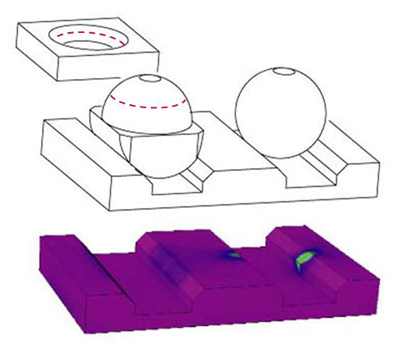
An interesting effect in elastic contacts is that the maximum stress points occur not at the mating surfaces, but rather deeper inside the bodies. | |||||||||||||||||||||||||||||||||||||
| 650-605-4500 | ©2017 g2-engineering |